

AIによるモビリティの刷新が秘める価値観変容の可能性
2021年9月7日、東京大学次世代知能科学研究センターが主催した連続シンポジウムの第3回がオンラインで開催されました。この記事では、「AIはモビリティをいかに進化させるか?」というテーマが掲げられたシンポジウムで発表された内容を要約することを通して、自動運転をはじめとした交通に関わるAI技術によって刷新されつつあるモビリティの現状とその刷新が引き起こす価値観変容の可能性を明らかにします。
量子コンピュータによる渋滞解消の試み
1人目の登壇者である豊田中央研究所・数理工学研究領域所属の吉田広顕氏は、東京大学ニューロインテリジェンス国際研究機構の合原一幸特別教授と共同で進めている、量子コンピュータを活用した渋滞解消の試みについて発表しました。古典的コンピュータでは現実的ではなかった膨大な演算を可能とする量子コンピュータは、現在世界各国のテック企業や研究機関で実用化に向けてさかんに研究されています。演算量の多いAIシステムは、量子コンピュータの応用が期待される事例のひとつに挙げられます。
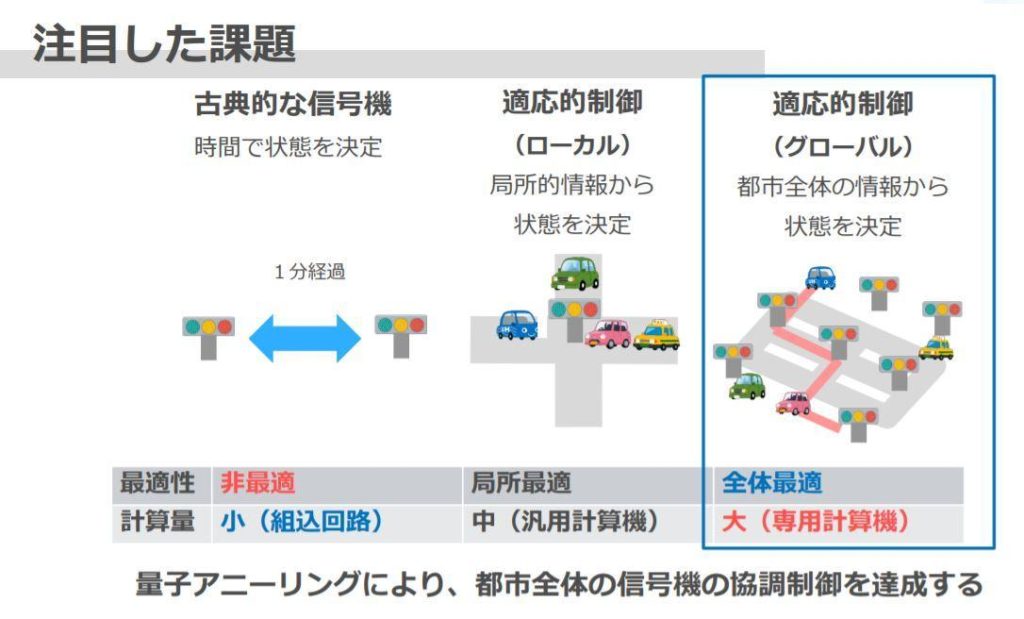
量子コンピュータの処理方式には、量子ゲートと量子アニーリングがあるのが知られています。量子アニーリング方式はすでに実機が稼働しており、D-Wave社開発のものが有名です。吉田氏の研究チームは、D-Waveの実機を使って広域の信号制御による交通渋滞の解決を試みました。こうした問題を選んだのは、多数の信号機を対象とした協調的制御は量子コンピュータが得意とする逐次的な最適化問題として定式化できるからです。
現在の信号機は、道路状況によって連鎖的に信号が変わるようになっています。しかし、連鎖的制御の範囲は局所的なものです。量子コンピュータを使えば、都市全体を制御範囲とした信号制御が可能となります。
量子コンピュータによる大域信号制御問題を解決するには、問題を計算可能なモデルに定式化する必要があります。今回の研究では、東西方向に50本、南北方向に50本の道路が直交する格子状の道路における信号制御に取り組みました。現実の道路に比べるとはるかに単純ですが、それでも各交差点に設置された信号機の状態の組み合わせは、2の2,500乗となります。
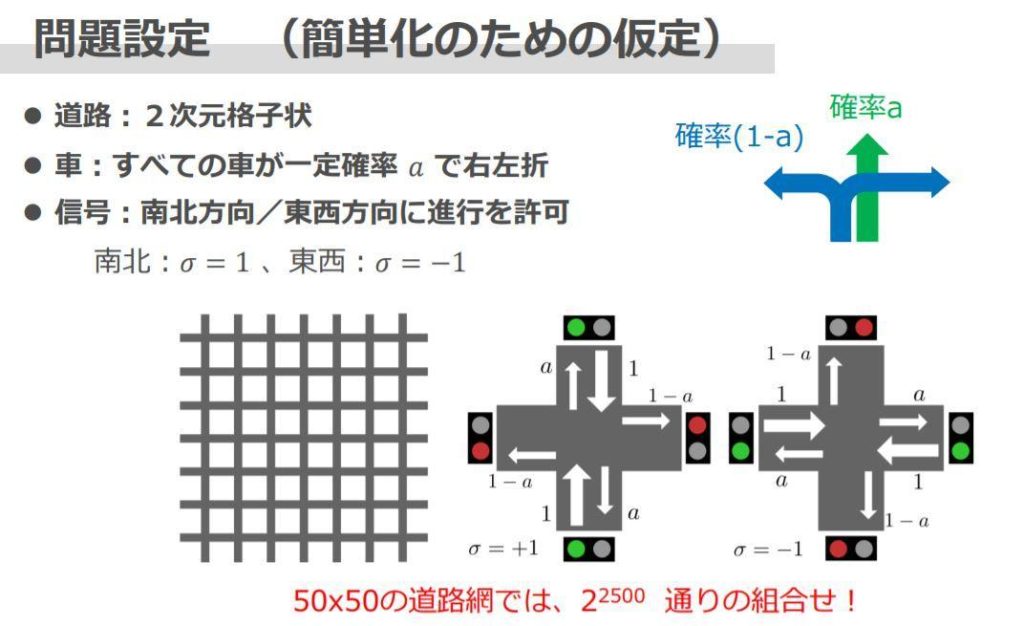
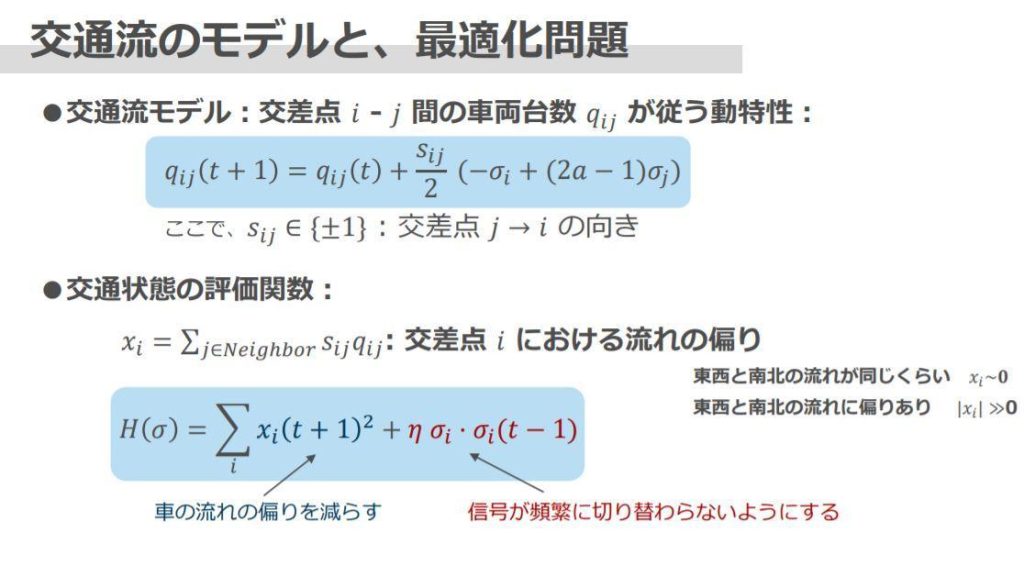
問題が定式化できたら、問題を数理モデルとして表現します。数理モデル化とともに重要なのが、問題を解決した状態を定義して計算式に表すことです。信号制御問題の解決とは、信号機の制御によって渋滞が発生しないことです。「渋滞が発生しない」という事態は、東西方向に走行する車両と南北方向に走るそれの流れに差がないことと定義できます。それゆえ、信号制御問題は車両の流れに偏りがないように交通流モデルの各種パラメータを最適化すれば解決することになります。
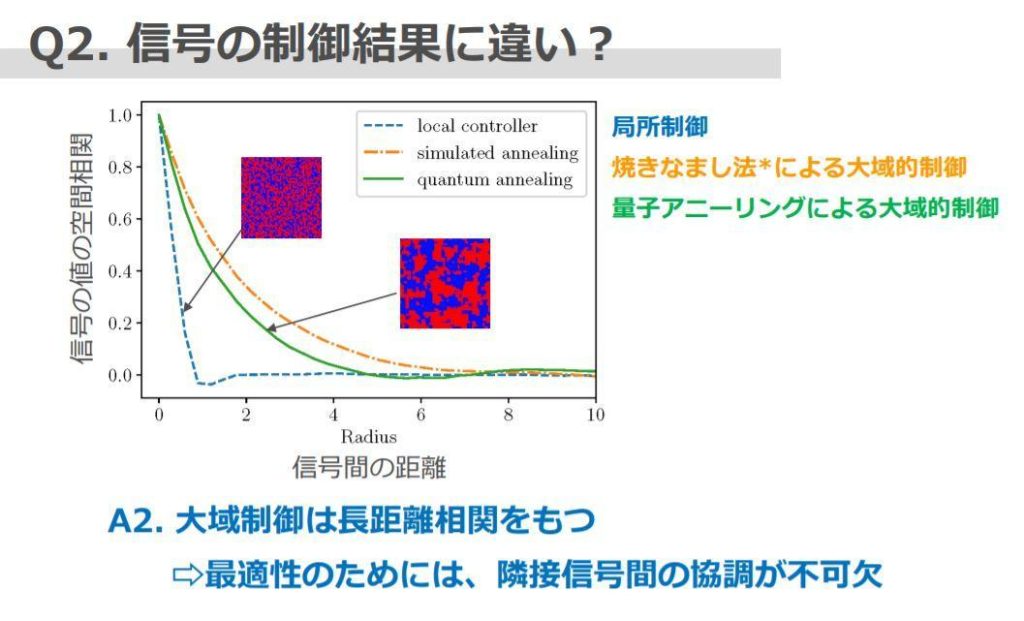
以上のように信号制御問題を計算可能なものとして量子コンピュータで演算した結果、局所的な信号制御や大域最適化問題に関する古典的解決法(焼きなまし法)と比べてさまざまな評価指標においてより良い結果が得られました。以下に引用する画像は、信号が連鎖的に制御される指標となる空間相関に関するグラフです。量子コンピュータによる制御では、信号間の距離が離れても連鎖的に制御されやすいことがわかります。
なお、解説した量子コンピュータによる信号制御事例は日経エレクトロニクス2021年9月号の「[豊田中央研究所]交差点2500カ所の信号を模擬 スムーズ移動の解はQAに軍配」でも読めます。また、吉田氏の研究チームは現在さらに複雑な交通状況におけるソリューションにも取り組んでいます。さらに、量子コンピュータ企業QunaSysと材料シミュレーションに関して共同研究を進めています。このように、量子コンピュータは今ではSF作品に登場する架空のデバイスではなく、本格的な社会実装が待たれる黎明期にあるのです。
UXデザインから見る人間にとって「信頼できないAI」と「信頼できるAI」
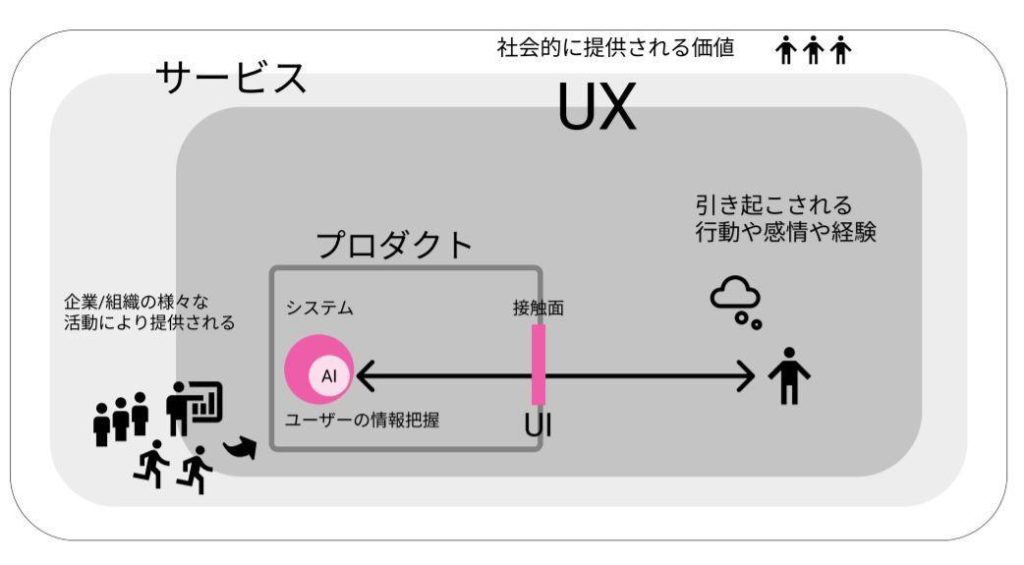
2人目の登壇者であるフリーランスのUXデザイナーとして活躍する松本悠里氏は、UXデザインの観点から考察した人間とAIの関係について発表しました。人間とITシステムの接触面としてのUI(User Interface)は今ではよく知られていますが、UIとUX(User eXperience)の違いはあまり知られていません。UXとは、UIをふくむユーザとITシステムのインタラクションに関わるすべての事象と定義できます。UXの考察対象には、ITシステムを使った時に生じるユーザの感動、さらにはIT製品がもつ社会的ブランドイメージもふくまれます。
AIのUXを語るうえで重要となるのは、AIの利活用における倫理規定をまとめたAIガイドラインです。AIガイドラインは2010年代終盤に世界各地で発表され、日本の「人間中心のAI社会原則」(2019)、欧州の「信頼できるAI」(2019)、そしてアメリカの「アメリカAIイニシアティブ」(2019)などがあります。これらはいずれもAIの利活用においては人間が主役であり、AIは公平かつ信頼できるものであるべきと定めています。こうしたガイドラインにもとづけば、UXから見てAIに求められる要件とは「公平性」「信頼性」「透明性」などとなります。
AIに求められるUX的要件を確認したうえで、松本氏は具体的なAI活用に関してUX観点から見た悪い例と良い例を紹介しました。信頼できない例には個人情報の取り扱いに関して住民の理解が得られなかったカナダ・トロントの都市計画「Sidewalk Toronto」、人種差別などの不適切な発言を学習してしまったMicrosoftが開発したチャットボットAI「Tay」、誤ったがん治療に関するアドバイスをしてしまったIBMが開発した「Watson for Oncology」が紹介されました。
信頼できる例にはユーザの嗜好をきめ細かく分析したうえで最適な楽曲をレコメンドする音楽ストリーミングサービスの「Spotify」、製薬のコスト削減を実現した「Drug Development」、受講者のみでも自動車運転教習を可能にした「AI教習所」、最適な移動手段を提案するMaaSサービス「moovit」が紹介されました。
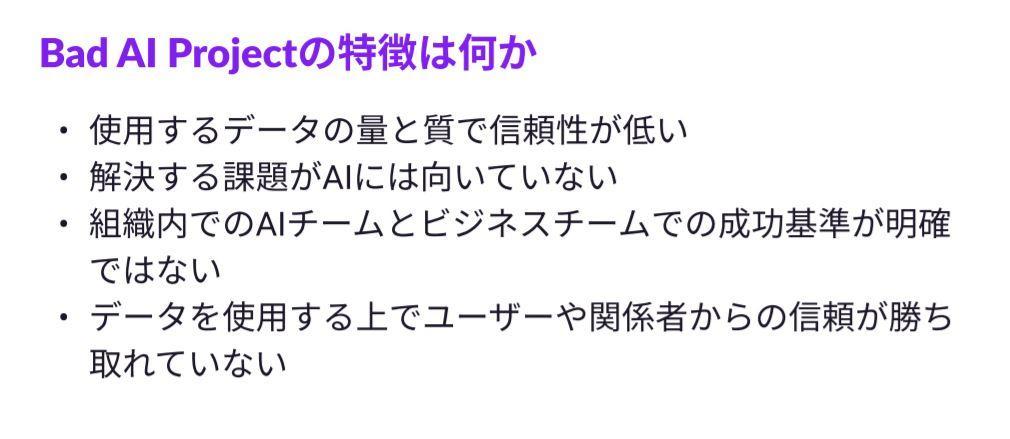
以上のような事例をふまえたうえで、松本氏は信頼できないAIと信頼できるAIに関する特徴をそれぞれまとめました。信頼できないAIの特徴は、「使用するデータの信頼性が低い」「解決すべき課題がAIに向いていない」「成功基準があいまい」「ユーザと関係者の信頼が得られていない」などが挙げられます。
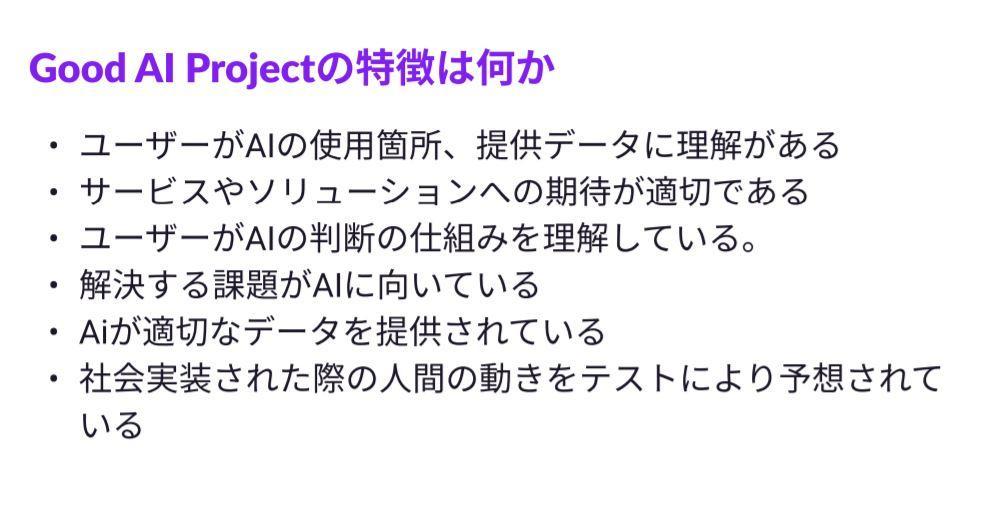
信頼できるAIの特徴は、「ユーザが使用されているAI技術を理解している」「サービスやソリューションが適切に期待されている」「解決すべき課題がAIに向いている」「適切なデータが使われている」「AIに対する人間の反応をテスト段階で予想している」などが挙げられます。
発表の締めくくりとして松本氏は、今後のAIの社会実装における課題として、AIの社会的位置づけの明確化やAI倫理の整備に言及しました。AIは目的に至るための手段で、信頼を獲得するには運営する組織の目的や選ぶ手段と方向性を問い、フィードバックの繰り返しを行うしかありません。
それ故に人間とAIの関係を包括的に考察するUXデザインの果たす役割は大きい、という見解を示しました。
AIによる都市交通改善の可能性と限界
3人目の登壇者である東京大学大学院工学系研究科所属の羽藤英二教授は、都市交通とAIの接点に関してさまざまなトピックを話しました。そうしたトピックのひとつとして、東京五輪2020における首都高料金の値上げの裏事情がありました。
20世紀中葉から研究されている都市交通理論の研究の成果として、道路利用料金の課金額(プライシング)によって交通量減少率が算出できることが知られています。東京五輪2020の開催にあたっては、何の施策も実行しない場合、首都圏各所にある競技会場につながる道路を中心に深刻な交通渋滞が発生することが予測されていました。そこでAIによるシミュレーションの結果、首都高料金を値上げすれば、15%程度交通量が減少して交通渋滞を回避できることがわかりました。

しかし、何の補償措置も設けずに首都高料金を値上げしただけでは、国民の理解が得られないのも容易に予想できました。そこで、日中の料金を1,000円値上げする一方で夜間の料金を半額にする妥協案が採用されました。この事例からはAIが正解を算出したとしても、その正解に合意してもらうには政治的配慮が必要という教訓が得られます。
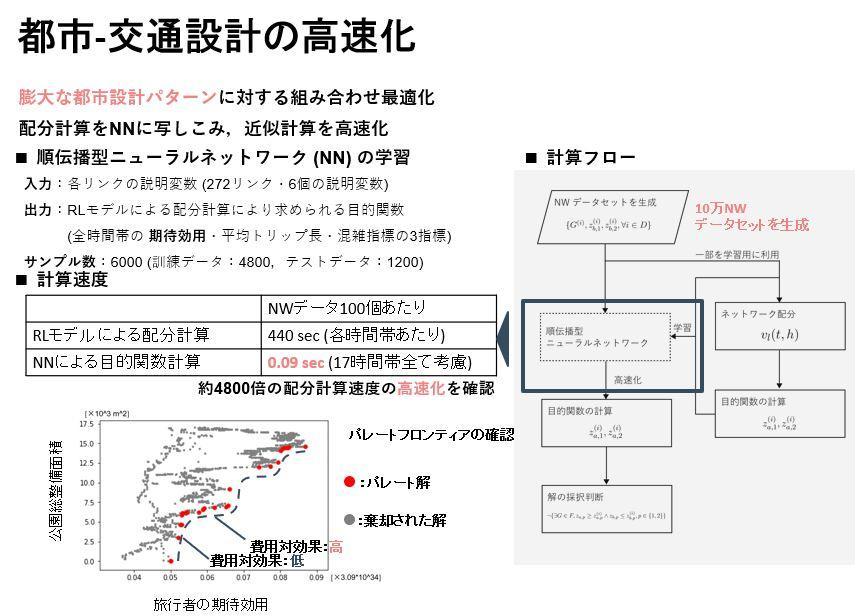
羽藤教授は、都市交通におけるAIモデルの有効性についても話しました。投資交通には道路や公園の位置など考慮すべき多数の事項があり、それらの事項の組み合わせは膨大になります。こうした大量のパラメータが関わる組み合わせ最適化問題の解決には、AIモデルのひとつであるニューラルネットワークが向いています。同教授が紹介して事例では、AIモデルを使うことで従来と比べ約4,800倍の計算高速化が確認されました。
自動運転が普及した場合に生じる都市交通の変化についても言及されました。ドライバーなしで最適経路を走行できる自動運転車が都市で普及した場合、数人が乗り合う自動運転車が都市のいたる所を走行する状況(この状況はActivity Hailingと呼ばれる)が想定されます。こうした状況では、従来の駅や幹線道路といった経路(つまりはリンク)を考察するアプローチから、ユーザにとって便利な地点(つまりはノード)を結ぶことを考察するそれに変わると考えられます。
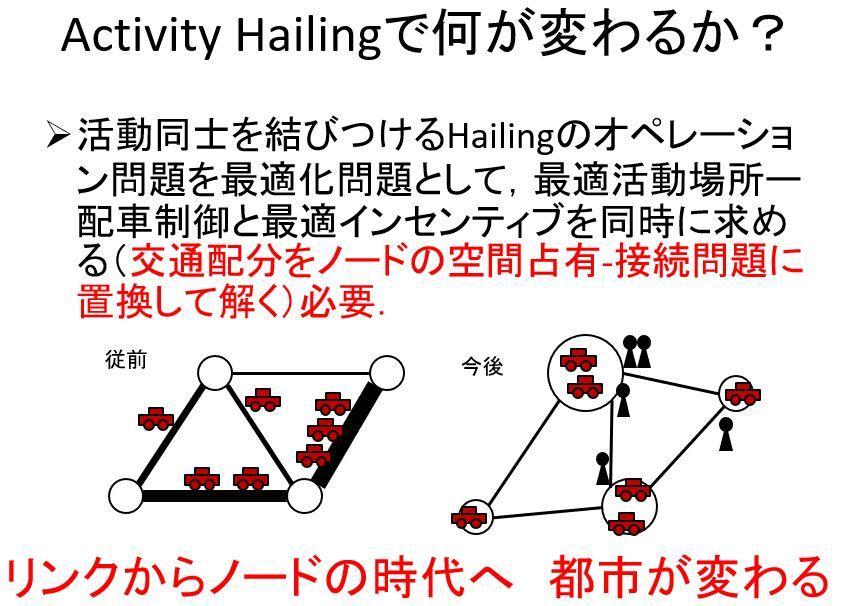
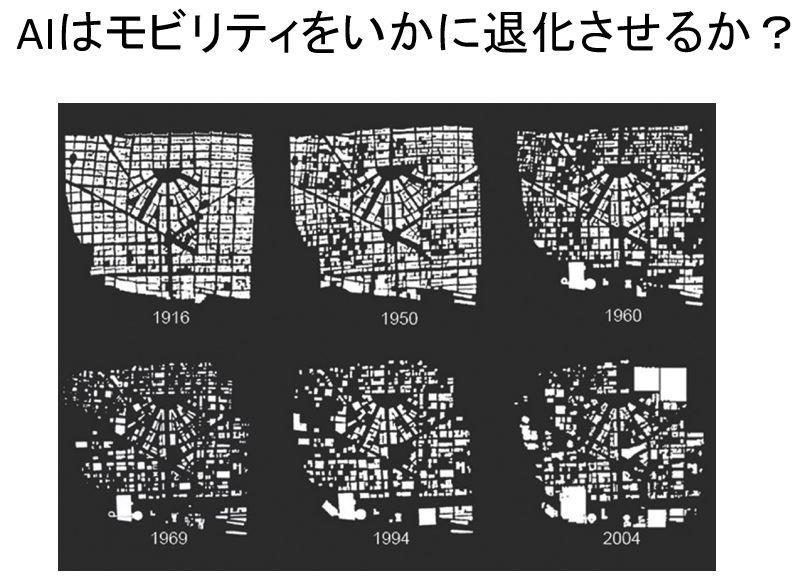
さいごに羽藤教授は、都市交通の歴史と未来を話題にしました。都市交通は街道沿いから整備され、交通の効率性向上のために駅やバス停のような交通の要衝を中心に発展しました。こうしたなか、自動運転を可能とするAIは、人々が望む出発点と終着点を直接的かつ効率的に結びつけるポテンシャルがあります。このポテンシャルは、街道や要衝を中心に発展してきた都市交通の前提を解体する可能性を秘めています。この可能性が引き起こすかも知れない都市交通の未来に関して、同教授は「AIはモビリティをいかに退化させるか?」と問題提起して発表を終えました。
自動運転普及におけるELSIの重要性
4人目の登壇者である東京大学生産技術研究所・次世代モビリティ研究センターの副センター長を務める中野公彦教授は、自身が進める自動運転の社会実装に向けた取り組みについて発表しました。
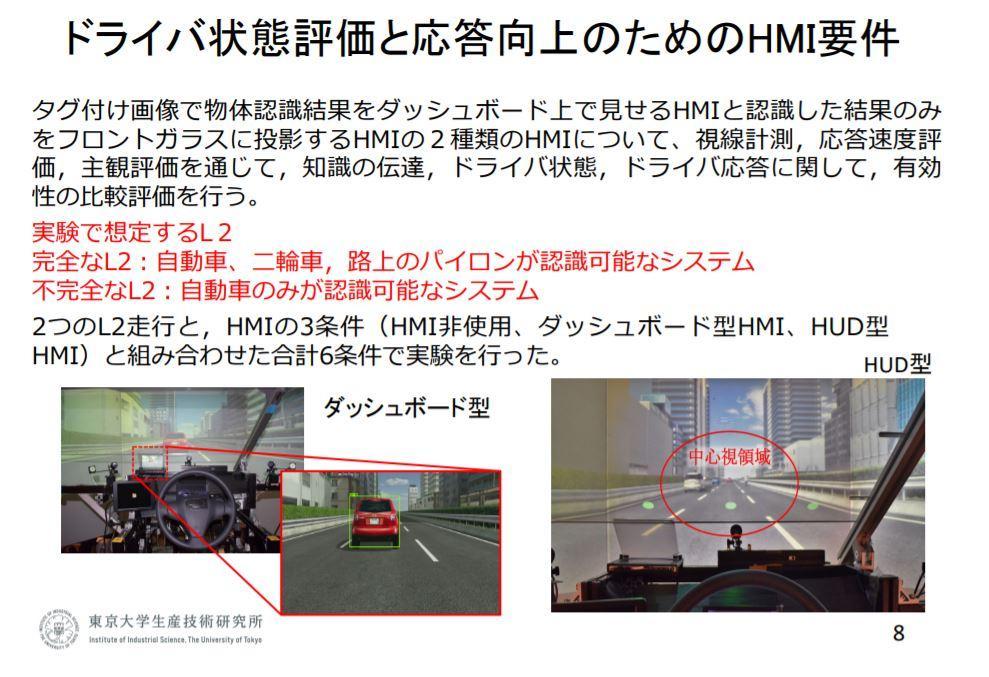
中野教授は、現在レベル2とレベル4の自動運転に関する実験に取り組んでいます。このうちレベル2の自動運転とは、一定の車間距離を保って走行する技術であるACC(Adaptive Cruise Control)と車線逸脱を防止する技術LKA(Lane Keeping Assist)を組み合わせて運転を支援する技術です。この技術を搭載した車両はすでに普及していますが、運転をAIに完全移譲することはできず、特定の条件下でのみ運転支援が作動するに留まります。こうした特徴によりレベル2走行において重要になるのは、ドライバーにAIによる支援の限界を知ってもらったうえで、ドライバーが適切な注意を払って運転することです。
中野教授は、レベル2搭載自動車の運転席設計がドライバーの注意力に及ぼす影響を調べるためにシミュレーションを使った比較実験を行いました。この実験には通常の運転席のほかに、自動車搭載AIが認識した車両を矩形で囲んで表示するダッシュボード型、ドライバーの注意がフロントガラス中心部に集まるようにしたHUD型を用意しました。さらに自動車のほかにも二輪車や路上のパイロンも認識可能な「完全なL2」と、自動車の認識のみが可能な「不完全なL2」を用意して認識性能に差異を設けました。3種類の運転席と2種類の認識性能を用意したため、実験の条件は6種類となりました。
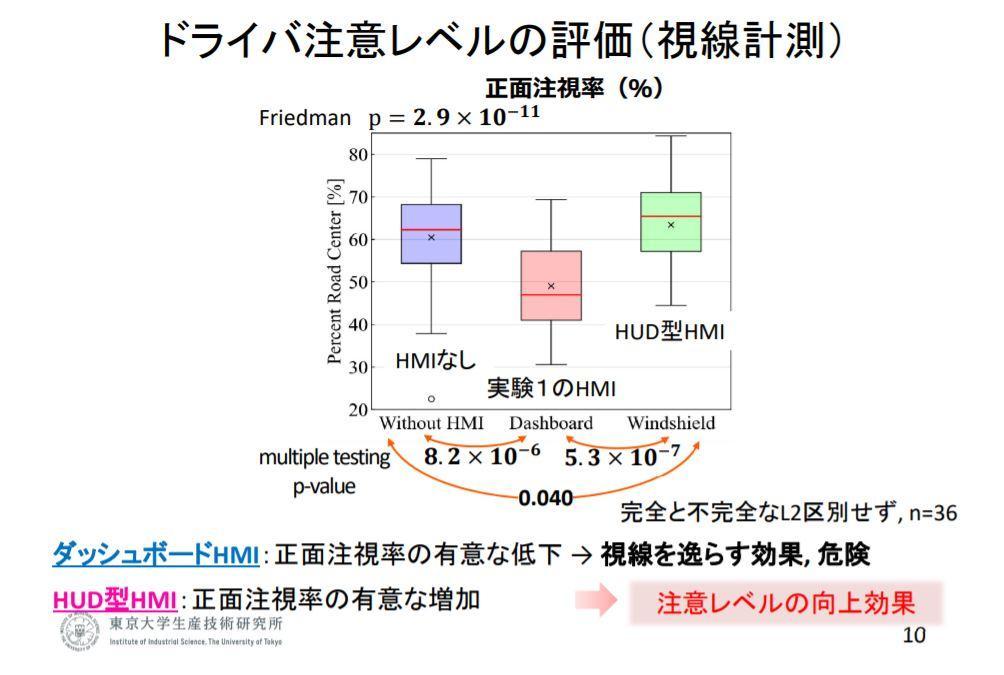
以上のような条件で実験してドライバーの視線を計測したところ、ダッシュボード型は通常の運転席より注意が逸れる一方で、HUD型がもっとも注意レベルが高いことがわかりました。また、完全なL2と不完全なL2を比較するために、それぞれの条件で運転してもらった後に被験者にアンケートに答えてもらったところ、完全なL2搭載車両では実験では体験しなかった「落下物があるなかでの運転」のような未体験の状況でもリスクを認識できると答え、不完全なL2ではそうしたリスクは認識できないと答えました。この結果は、完全なL2車両運転時にはリスクが過小評価される可能性があることを示しています。
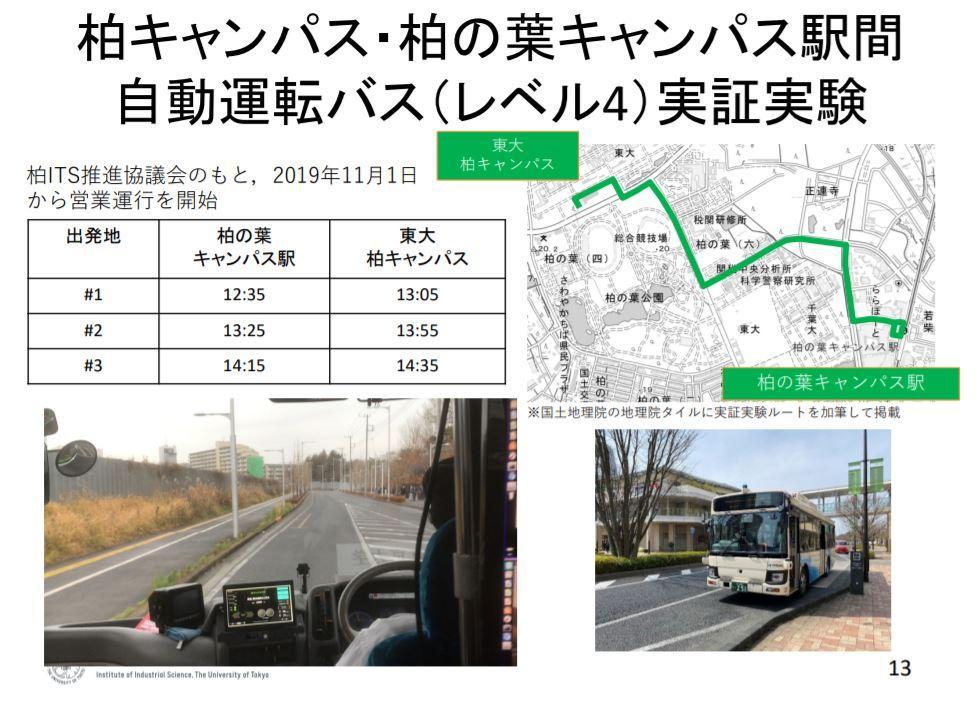
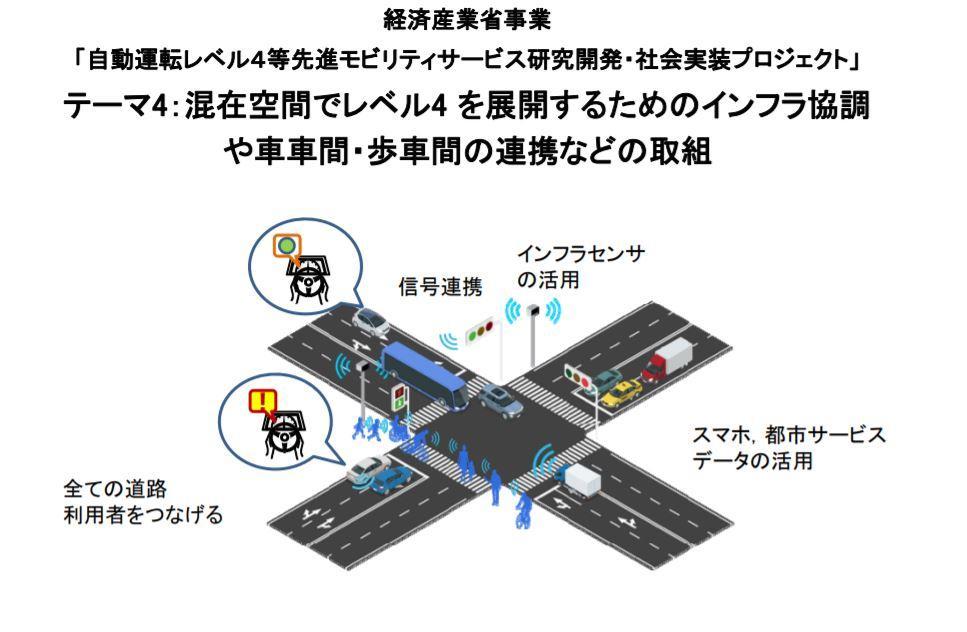
中野教授は、レベル4自動運転の実験にも取り組んでいます。レベル4とは、バスの走行経路のような一定領域においては、完全にAIが運転する技術を意味します。まだ実用化されていないこの技術に関しては、東京大学の柏キャンパスと柏の葉キャンパスをつなぐ実験用レベル4バスをドライバーが搭乗したうえで運用する実験を行っています。こうした実験の結果、レベル4実現の障害となるのは交差点やロータリーといった混在空間における運転であることがわかりました。
混在空間における自動運転実現のため、東京大学は9月より経済産業省と連携した事業「自動運転レベル4等先進モビリティサービス研究開発・社会実装プロジェクト」に取り組んでいます。同事業では、自動運転車両と信号機との連携のような交通インフラの整備についても実験されます。
以上のような実験に取り組んだ結果、中野教授は自動運転の社会実装のためには技術革新だけではなく、ELSIの整備と認知が不可欠であると考えるようになりました。ELSIとはEthical, Legal and Social Issues (倫理的、法的、社会的課題)の略で,科学技術の発展に伴って生じるさまざまな非技術的問題についてあらかじめ研究し,対処するための取り組みを指します。
東京大学は自動運転のELSIに関する取り組みとして、近隣住民に前述のレベル4実験バスに試乗してもらうイベントを開催しました。このイベントの目的は、住民に自動運転を体験してもらうことで、この技術が将来的に安全で快適な移動を提供することを知ってもらうことです。また、ニコニコ生放送で自動運転に関するオンラインフォーラムを実施したところ、5,000人ほどが視聴したことを報告して中野教授の発表は終わりました。
中野教授の発表の後、質問を募ったうえで登壇者4人によるパネルディスカッションが行われました。そこで語られた興味深い見解を箇条書きにすると、以下のようになります。
- レベル4自動運転車の実現は、ゴルフ場のカートのようなものであれば1~2年で可能。公道を自動運転する車両は2025年の実現を目指して取り組んでいるが、非常に難しい。自動運転車用の専用道路を作れば、実現が早まるかも知れない。
- レベル4自動運転車が実現したら、自家用車と公共交通の区別がなくなるかも知れない。というのも、自動運転車が利用者のいる場所に順次向かうようになれば、「車両の所有者」という意識が薄れるから。つまり、今日の自家用車における「車両の所有者 = 運転者」という固定観念が解体する可能性がある。
- 自動運転車の普及を阻む大きな要因は、導入コストが高いこと。こうしたなか、茨城県境町は自動運転バスを定常運行している。同町の橋本正裕町長は「町を変えたい」という明確なビジョンのもとコストとリスクをとっており、先駆的な事例となっている。
- 自動運転バスであっても、全くの無人で運用するのは利用者に不安を与えるかも。車内に遠隔監視カメラを設置するなどして、人間による見守りが必要だろう。
- 完全な自動運転が実現したら、自動車は移動手段というより「移動する部屋」となり住宅の延長物となるだろう。こうした事態は、短い時間のほうが望ましいとされて言わば「負の効用」をもつと考えられてきた移動が、住宅と同等の快適さが得られるべき「正の効用」をもつことを意味する。つまり、自動運転によって移動は再定義されるだろう。
- 自動運転と関連して論じられることが多いスマートシティ計画について、歴史的遺産が多く地域ごとに特色がある日本においては、ゼロから建設するのではなく、土地のもつ魅力を生かすような方向で推進するべき。
以上の見解が示すように、自動運転の実現と普及は「より速くより多く」の移動が良いとされる近代的なモビリティ観を変化させる可能性があります。それゆえ、自動運転の実用化を推進するにあたっては、人間と自動車の関係、さらには移動が生じる都市や国土の在り方を再考することが求められるでしょう。
Writer:吉本幸記